DOBOT SMB 300XS
Manipulare mobilă autonomă pentru soluții industriale
Fiabilitate
Algoritmul SLAM laser încorporat asigură o precizie excepțională, oferind o repetabilitate de până la ±5 mm și o precizie relativă de poziționare de ≤ ±2 mm. Acest lucru garantează o coordonare fluidă între forța de muncă, mașini și încărcătură, crescând semnificativ eficiența logisticii.

Extensibilitate
AMMR este extrem de modular și poate fi integrat cu ușurință cu roboți colaborativi (coboți), roboți mobili autonomi (AMR), camere și dispozitive de prindere. Este compatibil cu toți coboții din seria DOBOT CR, cu sisteme de vedere 2D/3D de top și cu dispozitive de prindere de la terți. O gamă largă de accesorii este disponibilă pentru a satisface diferite nevoi de transport și operare.

Instalabilitate
O singură platformă software simplifică întregul proces de configurare, inclusiv realizarea hărților, definirea punctelor de interes, planificarea traseelor, calibrarea robotului și configurarea sarcinilor. În plus, sistemul integrat de gestionare a resurselor eficientizează operațiunile, iar conexiunea MES fără întreruperi crește eficiența generală.
Protecție sporită cu funcții avansate de securitate
- Monitorizarea vitezei: Senzorul dublu urmărește continuu mișcarea și viteza de rotație și oprește automat motoarele dacă sunt depășite pragurile prestabilite.
- Bariera de siguranță: Senzorii de proximitate detectează apropierea de țintă și opresc robotul pentru a preveni coliziunile.
- Zonă de siguranță: Senzorii dubli LiDAR scanează pe 360 de grade, identificând zonele de siguranță stabilite de utilizator pentru o protecție optimă.

Calibrare accelerată a senzorilor vizuali
Setul opțional de viziune include un proces de calibrare 2,5D brevetat și un algoritm de poziționare vizuală pentru compensarea spațială, care asigură o precizie de poziționare de 0,5 mm. Calibrarea poate fi realizată manual sau automat, în doar trei pași, cu programare grafică fără cod. Setul suportă măsurători, citirea codurilor QR și recunoașterea caracterelor, permițând astfel o gamă largă de aplicații bazate pe viziune.

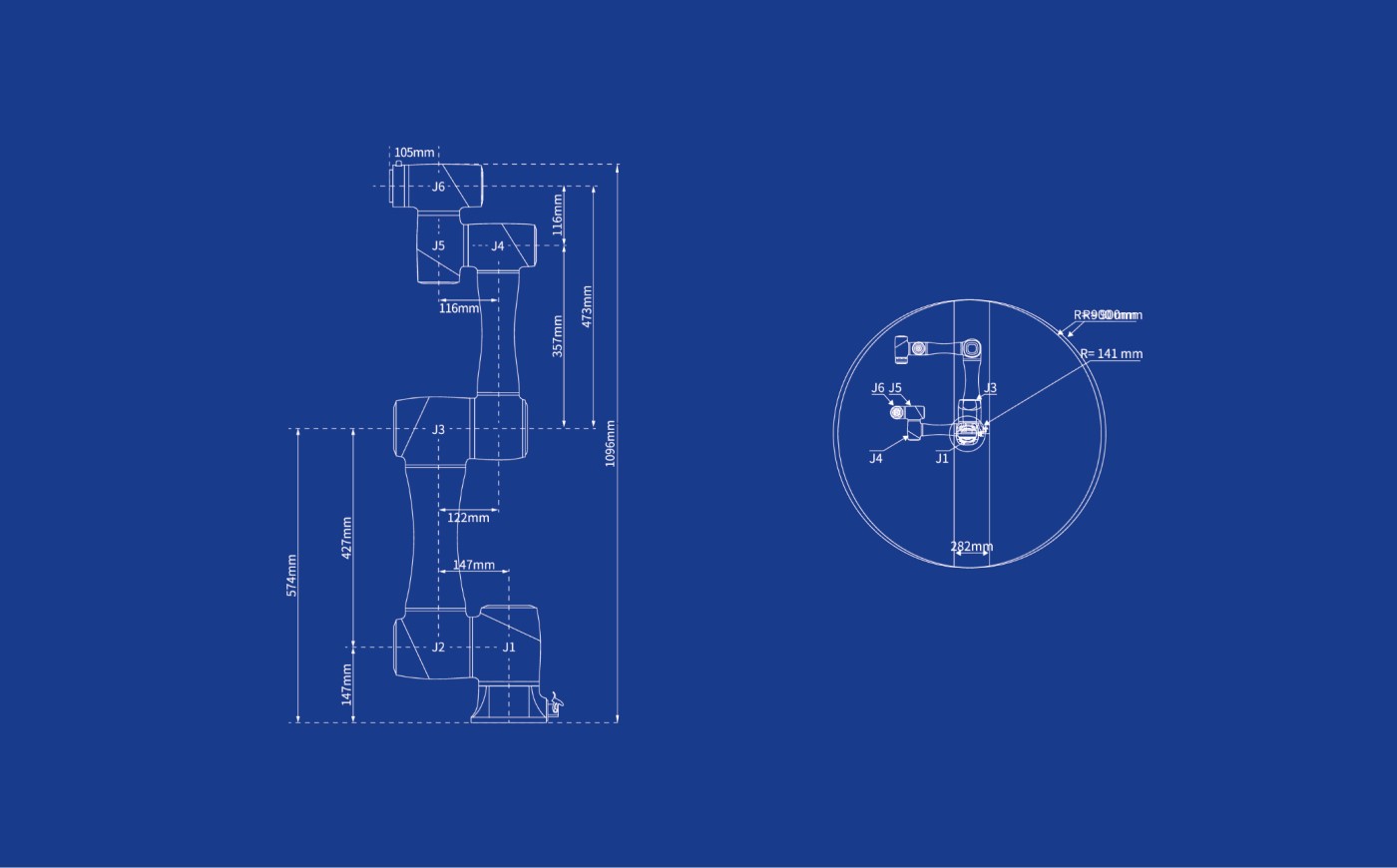
Dimensiunile produsului

Specificații tehnice
| Model | amb-300xs ```html
|
Parametru
``````html
| Metodă de navigare
``` | SLAM cu laser |
Mod de conducere | Diferential cu două roți ```html
|
Culoarea cochiliei
``` | Alb perlat |
Dimensiuni (fără brațe robotice) | 845mm × 585mm × 700mm |
Parametru de rotație | 980 mm |
Greutate (cu baterie) | 120 kg |
Capacitate de încărcare | 300 kg |
Lățimea minimă a coridorului | 725 mm |
Precizia navigației | +/-5 mm, +/-5° |
Viteza de navigare | ≤1,5 m/s |
Zonă Hartă | 200 000m2 |
Acumulator | Specificații | 48V, 40Ah (acumulator litiu) |
Perseverență | 8 ore |
Durata încărcării | ≤2,5 ore |
Mod de încărcare | Încărcare manuală / automată / rapidă |
Interfață extinsă | Putere DO | Comutator triplu (capacitate completă 24V/2A) |
DI | Unsprezece direcții (PNP/NPN) ```html
|
Suprafață de oprire de urgență
``````html
| Suport bidirecțional
``````html
|
Interfață de rețea
``` | Rețea cu fir | Rețea gigabit 2-căi M12 X-Code ```html
|
Rețea fără fir
``` | WI-FI 802.11 a/b/g/n/ac |
Panou de control | Numărul LiDAR | 2 (SICK nanoScan3) ```html
|
Buton de oprire de urgență, semnal acustic, lumină ambientală, roată de siguranță
``` | Da ```html
|
Afișaj HMI
``` | Nu |
Mediul de lucru | Temperatura ambientală | Între 0° și 50°C. 10-90% fără condensare | |
Calificare IP | IP20 |
Certificat | ISO 3691-4 | Da |
EMC/ESD, UN38.3, RoHS, REACH | Da |
Curățătorie | Clasa ISO 5 |
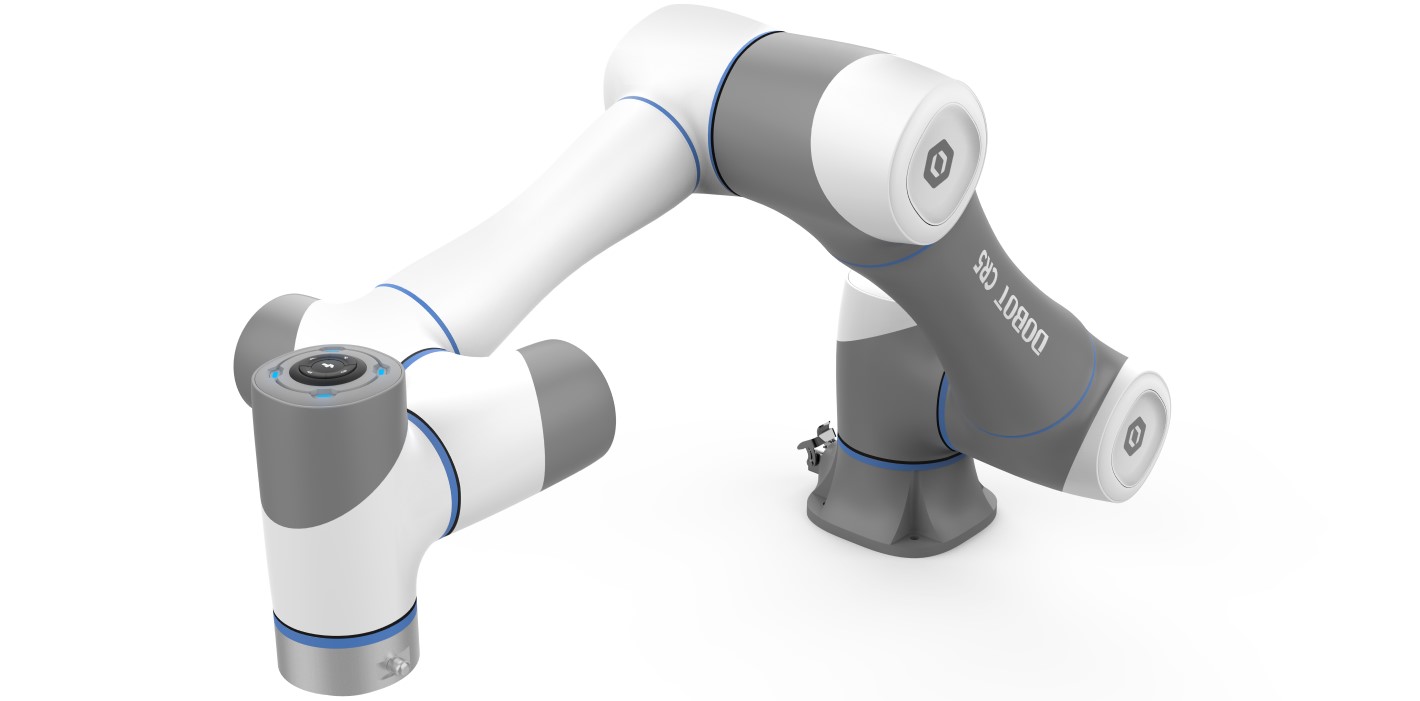
DOBOT COBOT CR5
Braț robotizat industrial colaborativ

Dobot CR5 aparține clasei de dimensiuni medii ale coboticilor industriali, dimensiunea sa compactă și capacitatea de încărcare de 5 kg permit automatizarea extinsă a producției cu ajutorul brațului robotizat. Sunt disponibile numeroase tipuri și domenii de utilizare ale uneltelor finale, făcându-l un instrument extrem de util în toate domeniile industriale. În plus, poate fi folosit excelent ca instrument de sprijin în instruirea profesională și în învățământul superior, în depozitare, simularea producției și în multe alte domenii.
INSTALARE FLEXIBILĂ, EXECUȚIE RAPIDĂ
Îmbunătățiți flexibilitatea fluxului de lucru și eficiența producției cu un robot colaborativ CR ușor de instalat, care poate fi asamblat în doar 20 de minute și poate fi utilizat în mai puțin de 1 oră. După conectarea consolei de control și fixarea brațului robotic, trebuie doar să conectați cele două dispozitive și apoi să porniți sistemul.
UȘOR ACCESIBIL, SIMPLU DE ÎNVĂȚAT

Software-ul și tehnologia aritmetică a Dobot fac ca operarea și gestionarea seriei de roboți colaborativi CR să fie inteligentă și simplă. Datorită software-ului și instrucțiunilor manuale, poate imita cu precizie mișcările umane. Nu este necesară cunoașterea programării. Acest lucru este facilitat de mediul de dezvoltare bazat pe blocuri, care elimină necesitatea de a învăța folosirea sistemelor și funcțiilor complexe de biblioteci de programare.
În cazul în care aveți cunoștințe anterioare de programare, sistemul robotului suportă limbajul de programare Python, astfel încât puteți beneficia de toate avantajele robotului.
Sistem de securitate avansat și multe altele

Un avantaj al roboților colaborativi este că sunt echipați cu senzori de detectare a presiunii în carcasă, astfel că atunci când presiunea depășește valoarea limită, robotul își oprește activitatea curentă și sistemul nu va continua procesul până când presiunea nu dispare. Prin această adiție, eficiența și siguranța muncii dintre om și robot pot atinge noi niveluri.
Extensibil și compatibil
Seria de roboți colaborativi CR este recomandată datorită gamei largi de instrumente finale și a interfețelor de comunicare universale. Seria de roboți CR cu mai multe intrări/ieșiri și interfețe de comunicare este extensibilă și compatibilă cu o mulțime de dispozitive compatibile cu brațele. Ca rezultat, roboții CR pot satisface o varietate de cerințe și pot fi utilizați în diferite situații de aplicare.
Investiție sigură, fiabilitate de excepție
Seria de brațe robotice colaborative CR promite o durată de viață de până la 32000 de ore datorită calității sale de construcție robuste și stabile, având în același timp costuri operaționale reduse. Astfel, membrii seriei CR nu sunt doar investiții sigure, ci și profitabile.
Caracteristici principale:
Numele produsului ```html
| DOBOT CR5
``` |
Greutate | 25kg |
Greutatea maximă utilă | 5kg |
Distanța maximă de acțiune | 1096mm |
Tensiune nominală | 48V DC |
Viteza maximă a numărului final de toc | 3m/s |
Raza de mișcare a articulațiilor | J1 | ±360° |
J2 | ±360° |
J3 | ±160° |
J4 | ±360° |
J5 | ±360° |
J6 | ±360° |
Viteză maximă a articulațiilor | J1/J2 | 180°/s |
J3/J4/J5/J6 | 180°/s |
Interfața I/O a sistemului de echipare finală | DI/DO/AI | 2 |
AO | 0 |
Interfață de comunicare | Comunicare | RS485 |
Control I/O | DI | 16 |
DO/DI | 16 |
IA/IO | 2 |
Codificatorul ABZ incremental | 1 |
Precizia repetării | ±0,02 mm |
Comunicare | TCP/IP, Modbus, EtherCAT, WIFI |
Standardul IP | IP54 |
Temperatura de funcționare | 0~45° |
Performanță ```html
| 150W
``` |
Materiale | Aliaj de aluminiu, plastic ABS |
Scule finale

Sculele terminale sunt dispozitivele care pot fi montate la capătul braţului roboţilor. Seria de roboţi colaborativi DOBOT CR este compatibilă cu o gamă largă de scule terminale, astfel încât să poată satisface chiar și cele mai specifice nevoi ale întreprinderilor.
- Ambalare și paletizare
- Manipulare
- Lustruire
- Înșurubare
- Lipire, dozare și sudare
- Asamblare
- Operare utilaje
- CNC
- Control calitate
- Injectare sub presiune
Conținutul Pachetului
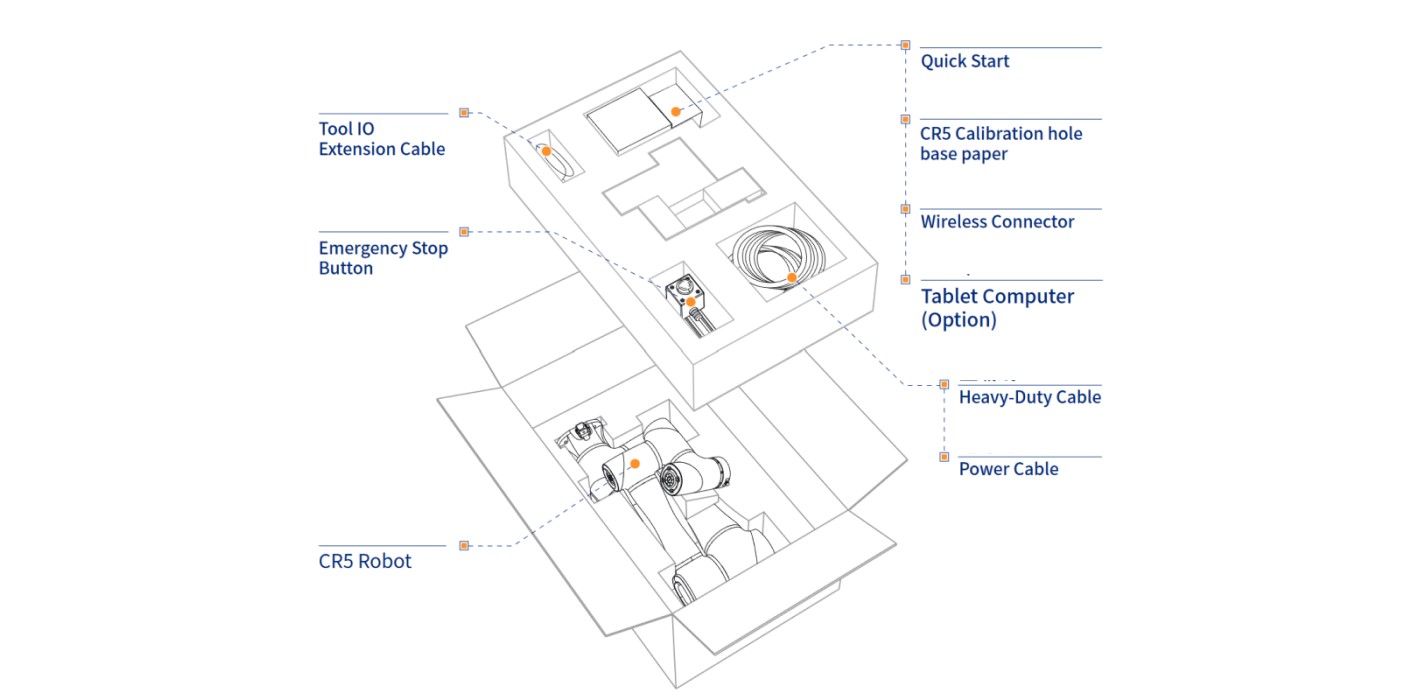
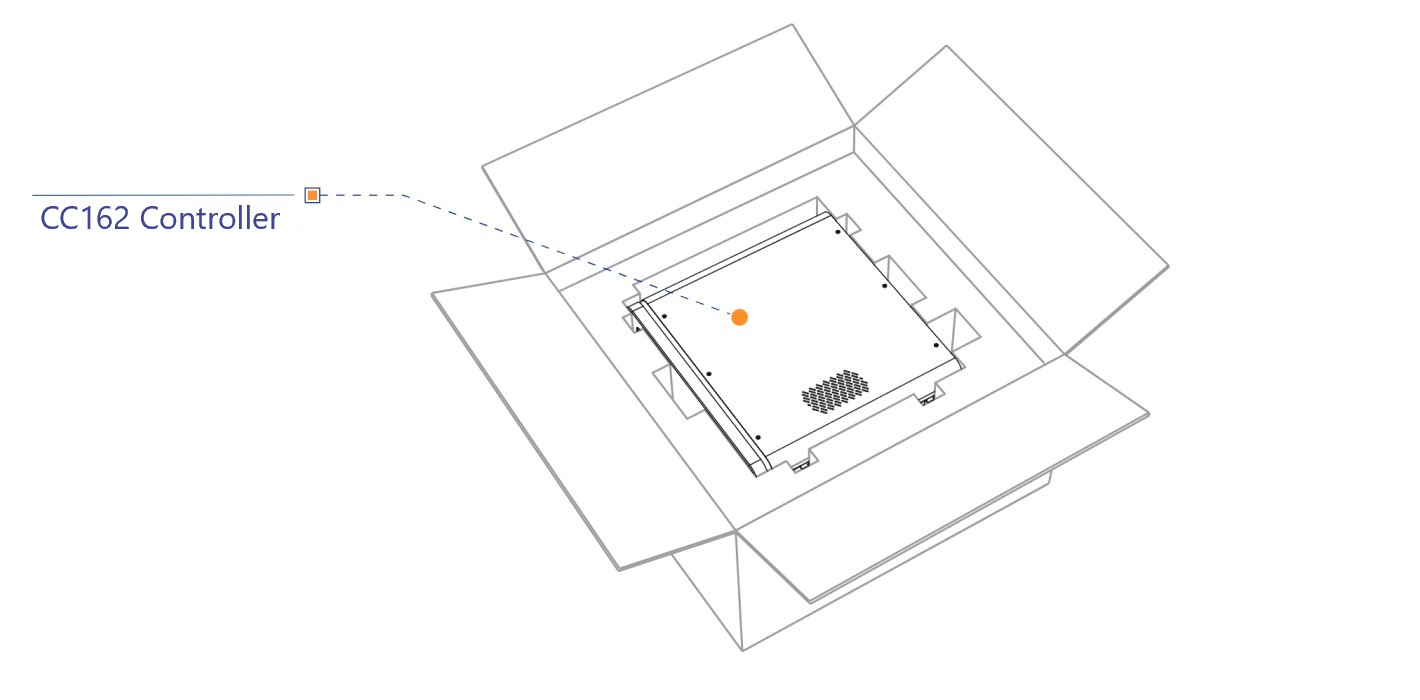
Un braț robotic este compus din două unități. Un braț robotic propriu-zis și o unitate de control necesară pentru programare. Unitatea de control este un computer care conține mediul de dezvoltare al brațului robotic. Această unitate de control dispune de porturile IO la care pot fi conectate diferite accesorii, inclusiv un comutator de oprire de urgență.
*Prin apăsarea comutatorului de oprire de urgență, robotul se oprește imediat din funcționare.
Pe lângă cele două unități, pachetul conține cablurile de alimentare ale unităților și cablul IO necesar pentru conectare.
*Brațul robotic este disponibil și cu un sistem de securitate îmbunătățit, care include acoperirea exterioară din silicon, permițând brațului robotic să se oprească deja în apropierea obiectelor străine, astfel prevenind, nu obstrucționând, accidentarea și îndeplinind sarcinile în mod eficient.
6 axe, 4 moduri de mișcare
Un braț robotizat poate lega două puncte de coordonate în 3 moduri pentru a ajunge din punctul A în punctul B:
Mișcare interpolată în articulații (Mișcare interpolată în articulații): Mișcarea se poate realiza cu programele GO și MoveJ, datorită cărora brațul robotului își ajustează poziția din punctul A în punctul B interpolând unghiurile articulațiilor sale, fără a lua în considerare poziția uneltei finale.
Mișcare interpolată liniar (Mișcare interpolată liniar): Mișcarea se poate realiza cu programul Move, datorită căruia robotul examinează poziția uneltei finale pentru a lega coordonatele punctelor A și B, conducând printr-o linie dreaptă unealta finală. În cazul mișcării liniare se poate distinge utilizarea modului jump, prin care unealta finală fie este mutată până la extremele celor două puncte de coordonate, fie se aplică rotunjirea coordonatelor punctului pentru execuția unei mișcări continue.
ARC - Mișcare interpolată circular (Mișcare interpolată circular): Robotul leagă punctele A și B de-a lungul unui arc cu ajutorul unui punct de sprijin C, realizând o mișcare în arc, considerând poziția uneltei finale.
Cerc - Mișcare interpolată circular (Mișcare interpolată circular): Robotul leagă punctele A și B realizând o mișcare într-o formă de cerc, utilizând un punct de sprijin C, ținând cont de poziția uneltei finale.
Programarea poate fi realizată în mai multe moduri. Acestea includ:
Reproducerea mișcării instrumentului final: Modul de programare aferent acestui lucru este programarea Teach & Playback, care reprezintă metoda de programare a brațelor robotice în care nu este necesară cunoașterea de programare pentru a seta parametrii unei sarcini. Programatorul poate mișca liber brațul robotic, ținând apăsat un buton de deblocare a unei siguranțe, apoi eliberează butonul pentru a stabiliza brațul în poziția dorită. Pe interfața de programare, aceste coordonate pot fi vizualizate și stocate ca un punct de coordonată pe care brațul robotic trebuie să îl atingă în timpul executării sarcinii. Prin salvarea acestor puncte, brațul robotic poate fi controlat fără a avea nevoie de cunoștințe de specialitate în programare.
Programare pe bază de blocuri (Drag and Drop): Cunoscută și sub numele de programare grafică, facilitează învățarea programării prin vizualizarea diferitelor funcții, variabile și moduri de operare. Principiul de funcționare se bazează pe conectarea blocurilor, adică programăm funcționarea brațului robotizat prin conectarea în serie a blocurilor care reprezintă diferitele funcții.
Script Python: Astăzi, unul dintre cele mai populare limbaje de programare Python este prima alegere pentru fiecare programator începător. Datorită sintaxei sale ușor de înțeles și numeroaselor sale biblioteci, nu este folosit doar pentru procese de automatizare, ci și pentru crearea de inteligențe artificiale. Astfel, robotica a ales și ea limbajul Python pentru a maximiza capacitățile roboților.
DobotCRStudio, care este mediul de dezvoltare pentru brațul robotizat, este echipat implicit cu bibliotecile necesare pentru controlul brațului robotizat, astfel încât nu aveți altceva de făcut decât să consultați documentațiile și să creați propriul program Python pentru funcționarea brațului robotizat.

Sisteme de coordonate
Un sistem de coordonate pentru un braț robotic este împărțit în patru sisteme de coordonate:
Sistemul de coordonate de bază: Sistemul de coordonate de bază determină coordonatele, poziția și mișcarea sculei finale, pe baza sistemului de coordonate de bază, definit de sistemul de coordonate ortogonal.
Sistemul de coordonate al articulațiilor: Sistemul de coordonate al articulațiilor este determinat de mișcările posibile ale fiecărei articulații.
Sistemul de coordonate al sculei finale: Un sistem de coordonate care determină distanța de translație și unghiul de rotație, a cărui origine și orientări variază în funcție de poziția piesei de lucru amplasate pe platforma robotului.
Sistemul de coordonate al utilizatorului: Un sistem de coordonate mobil, folosit pentru a reprezenta echipamente, cum ar fi mobilier, bancuri de lucru. Orientarea originii și a axelor poate fi determinată pe baza cerințelor de la fața locului, pentru a facilita măsurarea datelor punctelor din zona de lucru și aranjarea convenabilă a sarcinilor.
Puncte de singularitate
Atunci când robotul se mișcă într-un sistem de coordonate cartezian, viteza rezultantă a celor două axe nu poate fi în orice direcție, dacă direcțiile sunt aliniate, ceea ce duce la o deteriorare a gradului de libertate al robotului.
Robotul are trei puncte de singularitate.
